吸尘机器人控制管理系统电路设计 —电路图天天读(48)
清洁机器人是服务机器人的一种,能代替人进行清扫房间、车间、墙壁等。提出一种应用于室内的移动清洁机器人的设计的具体方案。其具有实用价值。室内清洁机器人的主要任务是能够代替人进行清扫工作,因此就需要有一定的智能。清洁机器人应该具备以下能力:能够自我导航,检测出墙壁,房间内的障碍物还可以避开;能够走遍房间的大部分空间,可以检测出电池的电量还可以自主返回充电,同时要求外形比较紧凑,运行稳定,噪音小;要具有人性化的接口,便于操作和控制。结合清洁机器人基本功能探讨其控制管理系统的硬件设计。
传统的微处理器如51系列虽然开发周期短,成本低,但其实时性不好,难以实现复杂的控制算法;另外,增加的外围电路数据转换速度慢,使机器人的性能得不到充分的发挥。高速DSP的出现虽然使得系统模块化和全数字化,但其开发成本高。与DSP具有同等性能的ARM微处理器资源丰富,具有非常好的通用性,其主要技术优点是高性能,低价格,低功耗,广泛地应用于所有的领域,因此将ARM应用于机器人控制管理系统不失为一种好的策略。LPC2210是飞利浦带有一个支持实时仿线TDMI-S微处理器,其采用3级流水线技术,能够并行处理指令。由于有很小的尺寸和极低的功耗,多个32位定时器、PWM输出和32个GPIO使它非常适合于工业控制和小型机器人系统,满足了机器人对控制器运算速度的要求。以LPC2210为核心。设计结构相对比较简单,稳定性很高的清洁机器人车体系统。
反射式光电开关是由红外LED光源和光敏二极管或光敏晶体管等光敏元件组成,当有障碍物阻拦时光线能够反射回来,输出为低电平信号;当没有障碍物阻拦时,光线不能反射回来,输出为高电平信号。吸尘机器人的近距离红外接近传感器是由两组相同的红外发射、接收电路组成。每一组电路可分为高频脉冲信号产生、红外发射调节与控制、红外发射驱动、红外接收等几个部分。通过38kHz晶振和非门电路得到一个38kHz的调制脉冲信号;利用三极管驱动红外发射管(TSAL6200)的发射。发射管发出的红外光经物体反射后被红外接收模块接收。通过接收头(HS0038B)内部自带的集成电路处理后返回一个数字信号,输入到微控制器的I/O口,如图3所示。接收头如果接收到38kHz的红外脉冲就会返回输出低电平,否则就会输出高电平。通过对I/0口的检测,便能判断物体的有无。
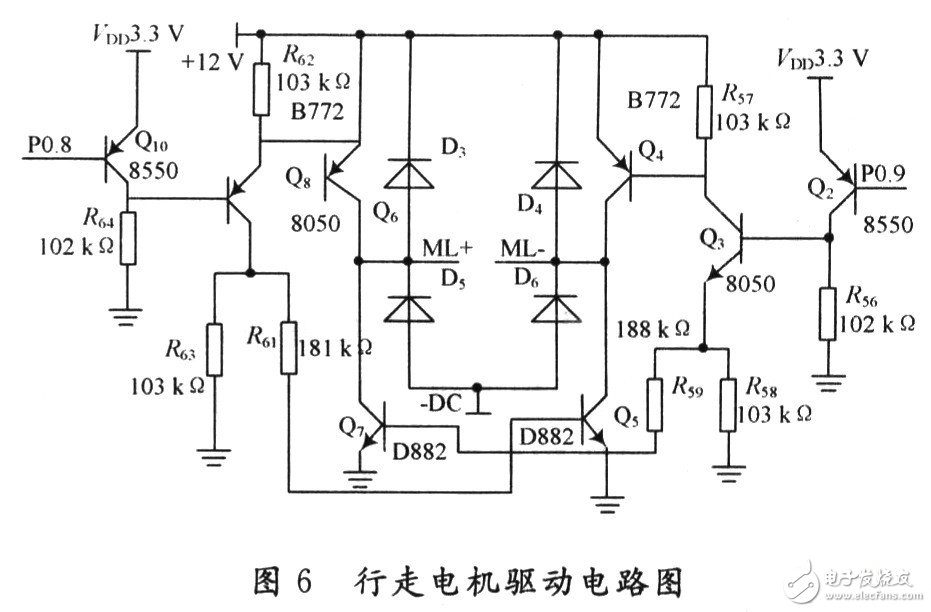
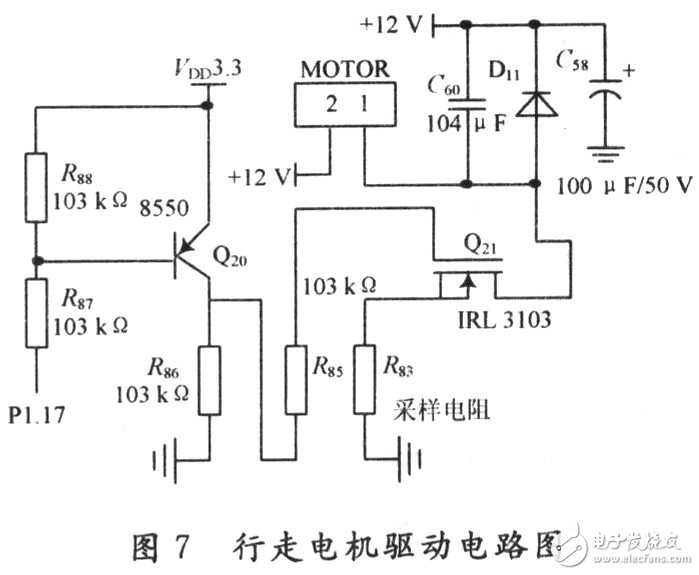
在小功率系统中,直流电机线性特性良好,控制性能优越,适合于点位和速度控制。为实现直流电机的正反转运行,只需要改变电机电源电压的极性。电压极性的变化和运行时间的长短可以由处理器实现,而提供直流电机正常运行的电流则需要驱动电路。
H桥式驱动电路是很常用的驱动电路。该设计两个行走驱动电机采用分立器件功率场效应管和续流二极管搭建,成本低,便于散热,如图所示。
用ARM7的P0.8和P0.9来控制电机,这两个管脚都是PWM输出管脚,能控制电机的速度。该部分主要保证机器人能够在平面内移动,同时轮上带有编码器,可以对行走的路程进行仔细的检测。通过航位推算能轻松实现机器人的转弯,假设机器人光电码盘的分度数为N;控制器收到的脉冲数为m;轮子的直径为D;两个轮子之间的间距为W,则轮子前进的距离即可算得。
清洁机器人作为服务机器人的一种,有着非常大的市场潜力和广阔的应用前景。随着传感技术的发展和微处理器的慢慢的提升,价格也在不断下降。在此研究和设计一个基于ARM7微处理器的清洁机器人控制管理系统,不仅满足了实用性的要求,而且在不增加成本的基础上为软件提供了良好的硬件支持,为更好的算法和软件升级提供良好的技术上的支持。若读者对机器人技术感兴趣,不妨多探讨一下未来发展的新趋势以及最新革新技术走势等等。