汽车辅助系统CAN总线接口电路设计 —电路图天天读(38)
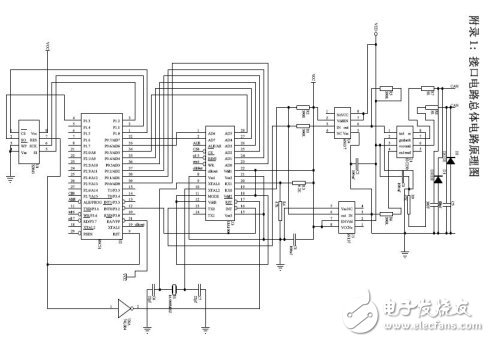
主要包括:单片机、控制器接口、总线收发器和看门狗电路等。采用Philips公司生产的SJA1000控制器和与其配套的 82C250总线物理层协议选择总线介质,设计布线方案,连接成CAN网络。双绞屏蔽线可设两套,在两套介质上一起进行信息传输,接收方只用一个介质。在冗余和非冗余段的连接临界点处进行总线切换。
硬件电路的设计主要是CAN 通信控制器与微处理器之间和CAN总线收发器与物理总线之间的接口电路的设计。CAN通信控制器是CAN总线接口电路的核心,主要完成CAN的通信协议,而CAN总线收发器的基本功能是增大通信距离,提高系统的瞬间抗干扰能力,保护总线,降低射频干扰(RFI),实现热防护等。看门狗电路主要是实现对电路的监控和复位作用。
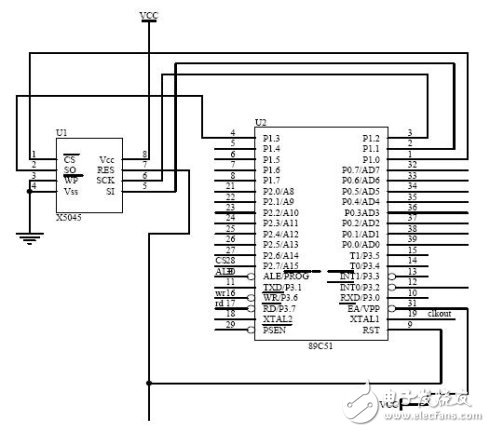
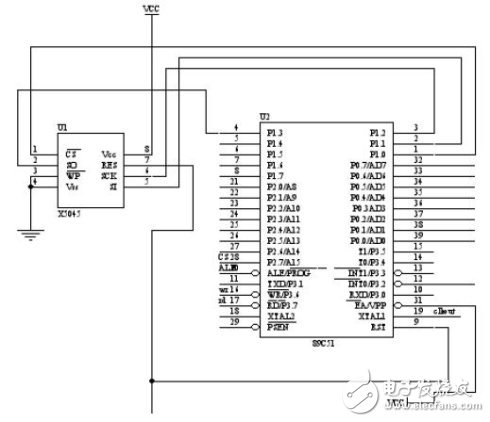
本设计中,应用到单片机为ATMEL公司51系列的89C51,该型号的单片机应用广泛,技术成熟,市场上价格实惠公道,而且在学习中所学到的多为该型号,在本次设计中是首选的芯片。89C51单片机作为系统的核心控制部分,但在本设计中不是重点讲解内容,其有关技术应用和引脚特点功能等,可参照其他有关的资料。设计的电路原理方框大致如下图所示。设计中为防止时钟信号的冲突,对单片机的外接晶振引脚XTAL1、XTAL2不接上外围电路,而是通过控制器SJA1000的时钟信号脚反馈给单片机。同时,对单片机的复位信号处理,RST引脚接上X5045P的RST脚,复位信号可由X5045P输出,在X5045P芯片看门狗外围电路的作用下,减少了以往由电阻、电容组成的简易复位电路造成的不精确、延时高等不良作用,使单片机回复到初始状态,完成复位操作。由于在该电路中要用到单片机的存储作用,存储由SJA1000传输过来的处理数据。因此,脚/EA接上高电平,选用片内ROM。对ALE脚,也即地址锁存有效信号除数端是和控制器 SJA1000的ALE脚接通。
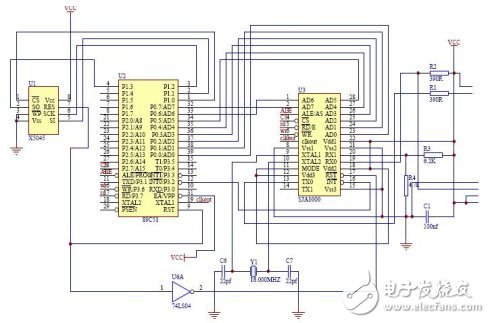
控制器SJA1000作为本接口电路中的控制部分,应用本设计中,对于SJA1000和单片机的连接,引脚AD0~AD7是和89C51的输出输入脚 P0.0~P0.7相接;SJA1000的片选信号脚/CS必须由微控制器的P2.7口控制否则这个片选输入必须接到VSS 也能够最终靠地址解码控制例如当地址/数据总线用于其他外围器件,ALE对应ALE,读/写输入脚/WR、/RD,/INT和单片机的/INT0连接,由于在该系统中要用到相同的时钟频率,所以我们要时钟信号引脚CLKOUT和单片机的XTAL1脚相连,达到频率一致的目的;而在复位信号的处理,可以在看门狗外围电路的RST信号输出后再通过和非门电路的相连,很好的实现了电路的复位作用。而对于控制器的收发引脚TX0,TX1与RX0,RX1,在本系统中 TX0、RX0可和收发器82C250的TXD、RXD接通。同时,在和CPU接口中SJA1000 支持对两个著名的微型控制器系列的直接连接80C51 、68xx 。通过SJA1000 的MODE 引脚可选择接口模式Intel 模式 MODE 高;Motorola 模式 MODE 低。在Intel 模式和Motorola 模式里地址/数据总线和读/写控制信号的连接。本设计中,正是使用Intel模式。对SJA1000的Vdd1~Vdd3电源输入脚,外接上驱动+5V电压;而Vss1~Vss3输出接地。设计中,对SJA1000提供16Mkz的晶振。
欲了解视频监控相关解决方案与电路图设计,可关注电子发烧友荣誉出品的Designs of week栏目:
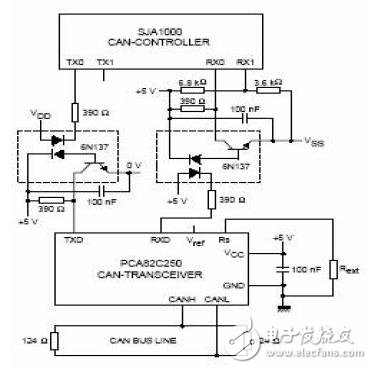
82C250是CAN控制器与物理总线间的接口,能够给大家提供对总线的差动发送和接收能力,与IS011898标准完全兼容,并具有抗汽车环境下的瞬间干扰、保护总线的能力。设计中,收发器的接受、发送脚原理上要和SJA1000的发送、接受脚相连接。但这样一来,两者的电气不一致,造成电气隔离,给通信带来麻烦。为此,在它们之间接上高速光耦合器6N137,避开了电气隔离,更好的实现通信联系。82C250的TXD、RXT就对应接上6N137的输出脚OUT和输入脚 IN;脚Rs作为斜率控制电阻输入端,电阻的大小可以割据总线通信速度适当调整一般在16~140K之间,设计中Rs阻值为47K。在通过接一个 47K电阻分流之后,可以接地。电压引脚Vcc,其电源电压:4.5V〈 Vcc〈 5.5V,在设计中采用5V电压。Vref作为基准电压输出端,设计中可以接地。而CANH,CANL脚是信号的输入输出,实现对电平信号的传送,通过它们连接上双绞线,完成通信传输。
X5045P在本设计中做为复位、监控电路使用,虽然增加了电路连接的复杂和成本,但对于电路的稳定和可靠性有起到非常大的作用,是系统中必不可少的部分。对X5045的操作是通过4根口线CS、SCK、SI和SO进行同步串行通信来完成的。SCK是外部输入的同步时钟信号。在对芯片定改指令或数据时,时钟前沿将SI引脚信号输入;在读邮数据时,时钟后沿将数据位输出到SO引脚上。数据的输入/输出都是高位在先。在设计中,/CS脚和单片机P1.0、 SI、 SCK、SO、RST分别与单片机的引脚P1.0~P1.3、RST连接。对于不用到的引脚,可以直接和地相连。电路设计如下:
欲了解视频监控相关解决方案与电路图设计,可关注电子发烧友荣誉出品的Designs of week栏目:
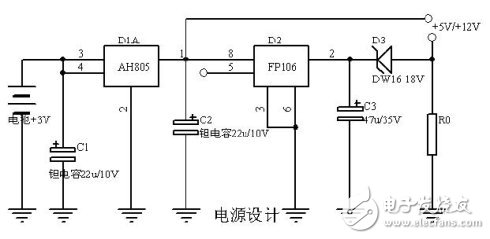
设计中,对系统的电源都一致采用DC+5V电压,光耦部分电路所采用的两个电源Vcc和Vdd必须完全隔离。为此,设计电源如下所示:
它由AH805升压模块及FP106升压模块组成。AH805是一种输入1.2~3V,输出5V的升压模块,在3V电池供电时可输出100mA电流。 FP106是贴片式升压模块,输入4~6V,输出固定电压为291V,输出电流可达40mA,AH805及FP106都是一个电平控制的关闭电源控制端。两节1.5V碱性电池输出的3V电压输入AH805,AH805输出+5V电压,其一路作5V输出,另一路输入FP106使其产生28~30V电压,经稳压管稳压后输出+12V电压。从图中能够准确的看出,只要改变稳压管的稳压值,就可以获得不同的输出电压,使用十分灵活。FP106的第⑤脚为控制电源关闭端,在关闭电源时,耗电几乎为零,当第⑤脚加高电平2.5V时,电源导通;当第⑤脚加低电平0.4V时,电源被关闭。可以用电路来控制或手动控制,若不需控制时,第⑤脚与第⑧脚连接。
在本电路原理中,控制单元以单片机AT89C51为核心,选用器件SJA1000作为CAN控制器,并选用芯片82C250和6N137、X5045P作为CAN控制器接口和光耦合隔离、复位电路。在实际中,应注意以下几个问题
1. SJA1000的中断请求信号INT在中断允许且有中断发生时,由高电来此跳变到低电平,所以INT和AT0C51的INT0直接相连。片选信号CS和单片机引脚P2.7相连,当CS接到低电平时,SJA1000被选中,CPU可对SJA1000进行读/写操作。为增强CAN总线节点的抗干扰的能力。 SJA1000的TX1脚悬空,RX1引脚的电位必须维持在约0.5VCC上,否则,将不能形成CAN协议要求的电平逻辑。
2. SJA1000的TxD和RxD并不是直接与82C250的TxD和RxD相连而是通过高速光耦合6N137后与82C250相连,这样就可以很好的实现了总线上个CAN节点的电气隔离,不过应该特别说明一点的是光耦部分电路所采用的两个电源Vcc和Vdd必须完全隔离,否则采用光耦也就失去了意思。电源的完全隔离可采用小功率电源隔离模块或带多5V隔离输出的开关电源模块实现,这些部分虽然增加了节点的复杂,但是却提高了节点的稳定性和安全性,保护 CAN控制器正常工作。
现场总线标准及其技术日益成为国际自动控制领域关注的一大焦点,其原因是它改变了传统控制管理系统的结构,形成了全新的网络集成分布式控制系统。在我国,现场总线已发展到推广应用阶段,中国慢慢的变成了各种现场总线激烈争夺的重要战场。因此研究现场总线技术及其产品就显得很重要。本文正是基于控制器 SJA1000和82C250收发器的基础上,外接上看门狗电路芯片X5045P及高速光耦合器6N137,设计CAN总线接口电路,该电路理论上很好的实现了设计原理要求。该设计简单明了,在电路实现时,还需考虑各模块间的接地、屏蔽等诸多问题。PCA82C250提供对物理总线的符合CAN电气协议的差动发送和接收功能,另外,它具有的电流限制电路,还提供了对总线的进一步的保护功能。通过 82C250与物理总线进行连接,可使总线个节点的挂接。对于CAN控制器及带有CAN总线并不是一定要使用的器件,因为多数CAN控制器均具有配置灵活的收发接口并允许总线故障,只是驱动能力一般只允许20~30个节点连接在一条总线上。
Microchip收购ADAS和数字驾驶舱连接先驱VSI Co. Ltd.扩大车联网市场领先地位
更智能、更高效,德州仪器助力 Nullmax 智能驾驶产品亮相北京车展
Microchip收购ADAS和数字驾驶舱连接先驱VSI Co. Ltd. 扩大车联网市场领先地位
吉利汽车与ST签署SiC长期供应协议,深化新能源汽车转型;成立创新联合实验室,推动双方创新合作
罗德与施瓦茨和杜尔合作开发ADAS/AD功能测试 ,用于下线测试(EOL)和按时进行检查(PTI)